

di Erik Carlberg, Senior Product manager, Strategia prodotti radio a corto raggio, u-blox
La tecnologia Bluetooth offre, al momento, una risposta inedita all’enigma del posizionamento ad alta precisione in ambienti interni. Noi l’abbiamo testata in un magazzino industriale attraverso una prova di fattibilità.
Riconoscimento della posizione: è uno dei vantaggi principali dell’IoT per aziende e consumatori. I Responsabili del parco macchine possono tracciare i veicoli, le aziende di logistica possono controllare le merci spedite e gli agricoltori possono tenere d’occhio il bestiame. Tutto ciò in tempo reale e a prezzi contenuti. Anche voi e io potremmo acquistare un dispositivo connesso per monitorare un parente anziano, un animale domestico o un oggetto di valore come, ad esempio, un’auto.
Grazie a sistemi satellitari globali di navigazione (Global Navigation Satellite System, GNSS) tra cui GPS, GLONASS, BeiDou e Galileo, la localizzazione si è fatta strada in quasi ogni ambito dell’economia e della vita quotidiana. Nel frattempo, la tecnologia GNSS è migliorata anno dopo anno: la precisione è passata dai metri ai centimetri, il tempo di primo aggancio è passato da decine di secondi a qualche secondo e la disponibilità del servizio si è estesa fino a coprire anche le aree urbane più fitte.
Il posizionamento ad alta precisione presenta tuttavia ancora un punto debole: gli ambienti interni. I segnali GNSS più deboli non riescono a penetrarvi in maniera efficace. Di conseguenza, le migliorie legate al riconoscimento della posizione non si possono applicare a una vasta gamma di figure professionali e attività:
- Dirigenti ospedalieri che vogliono monitorare dispositivi medici, pazienti e personale
- Operatori aeroportuali che vogliono ottimizzare la gestione dei bagagli e individuare in modo tempestivo i passeggeri in ritardo
- Aziende di produzione che vogliono automatizzare i loro processi
- Organizzazioni specializzate nei servizi e nella vendita al dettaglio che vogliono tracciare il comportamento dei clienti e le operazioni back-end
- Responsabili di magazzino che vogliono snellire le operazioni attraverso robot senza operatore
Poiché buona parte dei segnali satellitari non è disponibile per ambienti di questo tipo bisogna fare ricorso a tecnologie diverse per colmare il divario. I dispositivi dotati di modem cellulari, ad esempio, possono utilizzare i segnali cellulari per avere una stima della posizione in rapporto alle torri cellulari vicine usando la cosiddetta «impronta digitale» della rete oppure tecnologie avanzate di time-of-flight. I dispositivi dotati di Wi-Fi possono adottare approcci simili per definire la propria posizione rispetto agli hotspot Wi-Fi. I dispositivi dotati di Bluetooth possono affidarsi all’indicatore della potenza del segnale ricevuto (Received Signal Strength Indicator, RSSI) per ottenere una stima approssimativa della distanza dai beacon Bluetooth utilizzati.
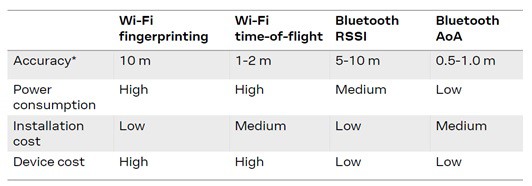
* Cifre approssimative. I valori esatti dipendono dai dettagli di distribuzione.
Tutte queste tecnologie presentano tuttavia limitazioni oggettive che ne hanno impedito una diffusione massiccia nei contesti sopra indicati, dove i punti di riferimento sono la precisione, la disponibilità, la semplicità d’uso e l’accessibilità delle tecnologie GNSS. Le tecnologie di localizzazione basate su reti cellulari o Wi-Fi hanno dei costi hardware piuttosto elevati ma non soddisfano le aspettative di accuratezza dei clienti. A dispetto della sua precisione ridotta, il Bluetooth RSSI ha saputo imporsi anche per applicazioni che richiedono un’accuratezza a misura di stanza, principalmente per i costi contenuti, i ridotti requisiti energetici e la compatibilità con buona parte dei dispositivi connessi in circolazione.
Nel 2019, il Bluetooth SIG ha alzato l’asticella nell’arena del posizionamento in ambienti interni con l’introduzione di Bluetooth Direction Finding. Questa soluzione che si basa su un segnale Bluetooth innovativo e array multiantenna per misurare l’angolo di trasferimento di un messaggio Bluetooth tra un tag mobile e uno o più punti di ancoraggio statici offre una possibile risposta all’enigma del posizionamento ad alta precisione in ambienti interni perché, per la prima volta, non rinuncia a nulla. Alta precisione? Soddisfatta. Semplicità d’impiego? Soddisfatta. Prezzo contenuto del dispositivo? Soddisfatto. Richiesta di potenza ridotta? Soddisfatta.
Sin dalla loro introduzione, le soluzioni di posizionamento in ambienti interni basate su Bluetooth hanno suscitato un notevole interesse: ABI Research ha previsto addirittura che l’invio di tag Bluetooth avrà un tasso di crescita annuo composto pari al 28,3% tra il 2019 e il 2025, con il maggiore incremento (64,2%) previsto per gli uffici «smart» e il valore numerico in assoluto più cospicuo (oltre 163 milioni) nei magazzini e nella logistica verticale. A fronte della complementarità con le nostre soluzioni GNSS per esterni, dell’ampio ecosistema globale di aziende che realizzano soluzioni basate su questa tecnologia, dei costi e dei requisiti energetici contenuti nonché dell’accuratezza di posizionamento inferiore al metro che può offrire, questa tecnologia è stata oggetto di ricerca e sviluppo anche da parte di u-blox.
Funzionamento della tecnologia Bluetooth per il posizionamento ad alta precisione in ambienti interni
La tecnologia alla base del posizionamento in ambienti interni Bluetooth è denominata Bluetooth Direction Finding. Come indica il nome stesso, il «rilevamento della direzione Bluetooth», disponibile in due versioni diverse, consente di determinare la direzione di trasferimento di un segnale Bluetooth tra un tag mobile e un punto di ancoraggio fisso. Nella versione basata sull’angolo di arrivo (Angle of Arrival, AoA) è il punto di ancoraggio a calcolare la direzione del segnale in ingresso inviato dal tag. Nella versione basata sull’angolo di partenza (Angle of Departure, AoD), i ruoli si invertono ed è il tag che deve calcolare l’angolo di trasmissione del segnale dal punto di ancoraggio.
In questo articolo ci concentreremo sull’AoA essendo la soluzione più adatta per il posizionamento in ambienti interni, mentre l’AoD presenta invece maggiori vantaggi per le soluzioni di navigazione, sempre in ambienti interni.
Per valutare al meglio questa tecnologia abbiamo realizzato una demo sul rilevamento della direzione Bluetooth basata sull’AoA nei nostri uffici di Malmö, in Svezia. Abbiamo programmato un servomeccanismo montato su un punto di ancoraggio per il rilevamento della direzione al fine di monitorare un tag Bluetooth di movimento in base all’angolo di arrivo del segnale in uscita, calcolato in tempo reale.
La tecnologia Bluetooth per il rilevamento della direzione poggia su due innovazioni. La prima è un segnale di rilevamento Bluetooth con dati aggiuntivi, denominato CTE (Constant Tone Extension, estensione di tono continuo). Mentre il resto del messaggio Bluetooth è modulato per il trasporto dei dati, il CTE è composto solo da una stringa di diversi «uno». Di conseguenza, il ricevitore può usare questa parte del messaggio per misurare con esattezza le differenze di fase tra i segnali. E questo ci porta alla seconda grande innovazione. Per ogni punto di ancoraggio non c’è un’antenna singola ma un array multiantenna.

L’immagine qui sopra mostra come il segnale di rilevamento della direzione emesso dal tag mobile raggiunge le singole antenne dell’array del punto di ancoraggio statico. A causa della differenza tra le distanze percorse, ciascuna antenna riceve il segnale con un lieve sfasamento rispetto alle altre. Questo può essere misurato con il CTE. Gli algoritmi in uso sulla MCU incorporata nel punto di ancoraggio possono analizzare i dati e calcolare l’angolo di arrivo del segnale con una precisione approssimativa di +/- X gradi.
Quando si utilizzano più punti di ancoraggio, gli angoli di arrivo dei vari punti di ancoraggio possono essere utilizzati per triangolare la posizione approssimativa del tracker. A tal fine occorre inserire le posizioni precise e gli orientamenti dei punti di ancoraggio nel motore di posizionamento che applica un altro algoritmo per calcolare la posizione in 2D o 3D dell’asset selezionato sulla base degli angoli di arrivo calcolati da ciascun punto di ancoraggio.
In un ufficio di 8 x 6 metri con quattro punti di ancoraggio montati agli angoli della stanza abbiamo ottenuto una precisione media inferiore a 1 metro con una probabilità del 95%.


Prova di fattibilità della nuova tecnologia in un magazzino industriale
Abbiamo testato la nostra soluzione di posizionamento Bluetooth per ambienti interni in un magazzino industriale, uno scenario d’impiego tipico di molte applicazioni di tracciamento. Il magazzino di 30 x 50 metri aveva scaffalature metalliche per attrezzature e scatoloni. La specifica Bluetooth definiva i layer inferiori per i dati RF grezzi ma non l’algoritmo con cui calcolare l’angolo di arrivo reale. Per la nostra prova abbiamo pertanto sviluppato un algoritmo efficiente da eseguire sulla MCU integrata nel chip Bluetooth che garantiva, al tempo stesso, una precisione elevata e un alto tasso di aggiornamento. In particolare abbiamo ottimizzato il front-end RF, le antenne, gli algoritmi incorporati per i moduli Bluetooth dei punti di ancoraggio e la dorsale di connettività wireless con cui mettere in rete i punti di ancoraggio.
Nell’immagine qui sotto sono rappresentati un tag Bluetooth e l’array di antenne a forma di L dei nostri punti di ancoraggio.

Per la nostra prova abbiamo usato dieci punti di ancoraggio per coprire un’altezza pari a sei metri e un’impronta di circa 1000 metri quadrati. Dopo un’intensa fase di progettazione e preparazione, l’installazione del sistema di posizionamento si è svolta senza intoppi e ha richiesto all’incirca due ore. Per massimizzare la linea di vista tra i tag dei tracker e gli array multiantenna abbiamo montato i punti di ancoraggio a un’altezza da terra compresa fra 3 e 5 metri.
Abbiamo semplificato l’impiego facendo ricorso a un software di tracciamento di un’azienda esterna, Traxmate, che ci ha permesso di inserire con estrema facilità le posizioni e gli orientamenti dei punti di ancoraggio e di configurare il motore di posizionamento utilizzando un’API integrata. Infine, abbiamo impostato la dorsale di comunicazione Wi-Fi tra ciascun punto di ancoraggio e il motore di posizionamento.
Per la nostra prova abbiamo investito molte energie nel pianificare la configurazione ideale, capace di garantire prestazioni affidabili in un ambiente interno che riprendesse, nella propria struttura, la complessità della maggior parte degli impieghi interni. Per prima cosa abbiamo posizionato i punti di ancoraggio in maniera strategica, in modo da ottimizzare la linea di vista fra le possibili posizioni dei tag e almeno tre punti di ancoraggio. Inoltre abbiamo dovuto gestire gli effetti multipercorso causati, ad esempio, dalla tendenza dei segnali radio di rimbalzare sulle pareti. Gli algoritmi che abbiamo adottato per il calcolo degli angoli nei nostri punti di ancoraggio prevedono una mitigazione multipercorso e assicurano prestazioni solide anche in un ambiente radio impegnativo come quello di un magazzino.
La nostra prova di fattibilità ha confermato la nostra previsione che il posizionamento Bluetooth ad alta precisione in ambienti interni sa mantenere le sue promesse. In primis, se ben distribuito, il sistema assicura un’accuratezza inferiore al metro che ci si aspetterebbe da altri metodi di posizionamento emergenti per ambienti interni. Un aspetto tipico dei dispositivi Bluetooth è rappresentato dal fatto che il costo dell’hardware è ben al di sotto di quello delle tecnologie rivali ciò vale anche per i requisiti energetici. Per molto tempo, l’impiego di soluzioni di posizionamento in ambienti esterni è stata una sfida non indifferente. L’integrazione della configurazione hardware da noi adottata con interfacce web simili a quella di Traxmate può essere una risposta al problema.
Riepilogo
Con il sistema di rilevamento della direzione Bluetooth, il Bluetooth SIG offre agli utenti una risposta convincente all’enigma del posizionamento in ambienti interni, risolvendo numerose carenze in soluzioni attualmente presenti sul mercato. Le nostre esperienze in uno studio «follow-me», in cui il sistema di rilevamento della direzione veniva utilizzato per guidare un servomeccanismo, che a sua volta poteva, ad esempio, muovere una telecamera, in un percorso interno a un ufficio nonché la prova di fattibilità in un magazzino industriale hanno ribadito come questa tecnologia possegga il potenziale di trasformare le applicazioni interne, proprio come il GNSS ha fatto negli ambienti esterni, con un preciso riconoscimento della posizione.
Per maggiori dettagli sull’hardware utilizzato nei nostri test e nelle nostre prove di fattibilità nonché per beneficiare degli algoritmi che abbiamo sviluppato per calcolare gli angoli di arrivo di ciascun punto di ancoraggio e la posizione stimata del motore di posizionamento nonché per mitigare gli effetti multipercorso per aumentare l’affidabilità della soluzione nel mondo reale vi invitiamo a dare un’occhiata ai nostri kit di esplorazione del sistema di posizionamento Bluetooth in ambienti interni e Bluetooth Direction Finding oppure a contattarci al link https://www.u-blox.com/en/contact-u-blox










{kind=link}